
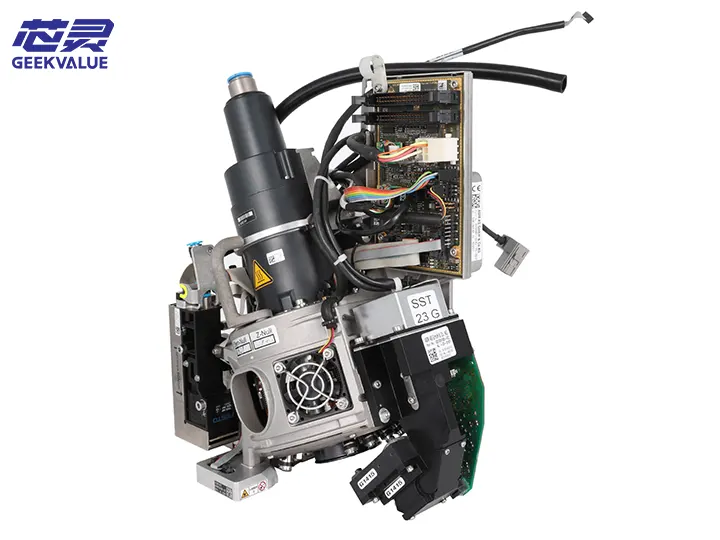
ຫົວເຮັດວຽກຂອງ SIPLACE CP14 ແມ່ນໂມດູນການຈັດວາງຫຼັກທີ່ອອກແບບໂດຍ ASM Assembly Systems (ເມື່ອກ່ອນແມ່ນ Siemens Electronic Assembly Systems) ສໍາລັບເຄື່ອງຈັກຈັດວາງທີ່ມີຄວາມໄວສູງແລະຄວາມແມ່ນຍໍາສູງ, ແລະເປັນສ່ວນປະກອບສໍາຄັນຂອງເຄື່ອງຈັດວາງຊຸດ SIPLACE X. ຫົວເຮັດວຽກແມ່ນເຫມາະສົມສໍາລັບສະພາບແວດລ້ອມການຜະລິດເອເລັກໂຕຣນິກທີ່ມີປະລິມານສູງ, ປະສົມປະສານສູງແລະເຫມາະສົມສໍາລັບການຈັດວາງທີ່ມີຄວາມໄວສູງແລະຊັດເຈນຂອງ 01005 ເຖິງອົງປະກອບ IC ຂະຫນາດໃຫຍ່ (ເຊັ່ນ: 0402, 0603, QFN, POP, ແລະອື່ນໆ).
2. ພື້ນຖານດ້ານວິຊາການແລະການວາງຕໍາແຫນ່ງຕະຫຼາດ
ພື້ນຖານການພັດທະນາ: ເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການບັນຈຸເຂົ້າຮຽນທີ່ມີຄວາມຫນາແຫນ້ນສູງຂອງອົງປະກອບຈຸນລະພາກ (01005) ແລະອົງປະກອບທີ່ມີຮູບຮ່າງພິເສດໃນອຸດສາຫະກໍາເຊັ່ນ 5G ແລະເຄື່ອງເອເລັກໂຕຣນິກລົດໃຫຍ່
ການຈັດຕໍາແຫນ່ງຕະຫຼາດ: ສາຍການຜະລິດ SMT ກາງຫາລະດັບສູງ, ການດຸ່ນດ່ຽງຄວາມໄວແລະຄວາມແມ່ນຍໍາ (ຄວາມໄວທາງທິດສະດີຂອງຫົວວຽກ CP14 ສາມາດບັນລຸ 156,000 CPH)
ການພົວພັນລຸ້ນ: CP14 ແມ່ນສະບັບປັບປຸງຂອງ CP12, ແລະການປັບປຸງຕົ້ນຕໍປະກອບມີ:
rod nozzle ແມ່ນ 30% ສີມ້ານ
ຄວາມໄວການຕອບສະຫນອງຂອງລະບົບສູນຍາກາດແມ່ນເພີ່ມຂຶ້ນ 20%
ເພີ່ມຟັງຊັນການສະແກນພື້ນຜິວອົງປະກອບ
3. ອະທິບາຍລະອຽດກ່ຽວກັບໂຄງສ້າງກົນຈັກ
1. ລະບົບກົນຈັກຫຼັກ
ຄຸນສົມບັດທາງວິຊາການຂອງລະບົບຍ່ອຍ
ລະບົບຂັບຫຼາຍແກນໃຊ້ມໍເຕີ linear + ເທກໂນໂລຍີຄູ່ມື suspension ສະນະແມ່ເຫຼັກ (ສິດທິບັດ DE102015216789), Z-axis repeatability ±5μm
ການຈັດວາງຫົວ matrix 16 nozzles ຖືກຄວບຄຸມເປັນເອກະລາດ, ແລະແຕ່ລະ nozzle ມີອຸປະກອນການຫມຸນແກນθເອກະລາດ (ຄວາມລະອຽດ 0.01°)
ກົນໄກການຫຼຸດຜ່ອນການສັ່ນສະເທືອນການອອກແບບການຫຼຸດຜ່ອນການສັ່ນສະເທືອນສາມລະດັບ (ການເຮັດໃຫ້សើមແມ່ເຫຼັກໄຟຟ້າ + buffer ຢາງ passive + ພາກຮຽນ spring ອາກາດ)
ການປ່ຽນໂມດູນດ່ວນ ການອອກແບບແບບໂມດູນ, ເວລາປ່ຽນຫົວວຽກດຽວ <90 ວິນາທີ (ລວມທັງການປັບທຽບ)
2. ລະບົບຄວບຄຸມການເຄື່ອນໄຫວ
ແກນ X/Y: ຂັບເຄື່ອນມໍເຕີເປັນເສັ້ນ, ເລັ່ງສູງສຸດ 3G
ແກນ Z: ຂັບ motor coil ສຽງ, ລະດັບການຄວບຄຸມຄວາມກົດດັນ 0.1-5N (ຂັ້ນຕອນໂຄງການ 0.01N)
θ axis: ມໍເຕີໄດໂດຍກົງ (DDM), ຄວາມໄວ 3000rpm
IV. ເອເລັກໂຕຣນິກ ແລະລະບົບເຊັນເຊີ
1. ເຄືອຂ່າຍເຊັນເຊີອັດສະລິຍະ
ປະເພດເຊັນເຊີ ຕົວກໍານົດການດ້ານວິຊາການ Function
3D laser altimeter ລະດັບການວັດແທກ 0-10mm, ຄວາມລະອຽດ 1μm ການກວດສອບອົງປະກອບຂອງ coplanarity, ການຊົດເຊີຍ PCB warpage
ລະບົບວິໄສທັດອັດຕາເຟມສູງ 2000fps CMOS, ຄວາມລະອຽດແສງ 5μm ການຈັດຮຽງອົງປະກອບຕາມເວລາຈິງ ແລະການກວດຫາຂໍ້ບົກພ່ອງ
ເຊັນເຊີສູນຍາກາດ Matrix 16 ຊ່ອງ ການກວດສອບເອກະລາດ, ເວລາຕອບສະໜອງ <1ms ການຕິດຕາມອັດຕາຄວາມສໍາເລັດໃນການຮັບ ແລະ ການຮັກສາການຄາດເດົາ
ໂມດູນຕິດຕາມກວດກາອຸນຫະພູມ 8 ຈຸດວັດແທກອຸນຫະພູມ, ຄວາມຖືກຕ້ອງ ± 0.5 ℃ ການຊົດເຊີຍການຜິດປົກກະຕິຄວາມຮ້ອນແລະການປົກປ້ອງ overheating
2. ສະຖາປັດຕະຍະກໍາຄວບຄຸມ
ຕົວຄວບຄຸມຫຼັກ: Xilinx Zynq UltraScale+ MPSoC
ການສື່ສານໃນເວລາທີ່ແທ້ຈິງ: TSN (Time Sensitive Network), ວົງຈອນເວລາ 62.5μs
ລະບົບຄວາມປອດໄພ: ເບກຄວາມປອດໄພ SIL3, ການກວດສອບການເຂົ້າລະຫັດແບບຊ້ໍາຊ້ອນຄູ່
V. ຕົວກໍານົດການປະສິດທິພາບ
1. ຂໍ້ກໍາຫນົດພື້ນຖານ
ດັດຊະນີພາລາມິເຕີ
ຂອບເຂດອົງປະກອບທີ່ໃຊ້ໄດ້ 01005 (0.4×0.2mm) ~ 30×30mm (ລວມທັງ 0.3mm pitch CSP)
ຄວາມໄວໃນການຕິດຕັ້ງທາງທິດສະດີ 156,000CPH (ມາດຕະຖານ IPC9850)
ຄວາມຖືກຕ້ອງຂອງການຕິດຕັ້ງ ±25μm@3σ (Cpk≥1.67)
ໄລຍະຫ່າງອົງປະກອບຕໍາ່ສຸດທີ່ 0.15mm (ຕ້ອງການ nozzle ພິເສດ)
ນ້ຳໜັກ 4.2kg (ລວມຊຸດຫົວສີດມາດຕະຖານ)
2. ຄວາມຕ້ອງການດ້ານສິ່ງແວດລ້ອມ
ຄວາມຕ້ອງການພາລາມິເຕີ
ອຸນຫະພູມການເຮັດວຽກ 23 ± 2 ℃ (ຕ້ອງການກອງປະຊຸມອຸນຫະພູມຄົງທີ່)
ລະດັບຄວາມຊຸ່ມຊື່ນ 40-60%RH (ບໍ່ condensation)
ອາກາດບີບອັດ 6bar±0.2bar, ISO8573-1 Class 2 ມາດຕະຖານ
VI. ນະວັດຕະກໍາເຕັກໂນໂລຢີຫຼັກ
1. ລະບົບການຊົດເຊີຍຄວາມຖືກຕ້ອງແບບໄດນາມິກ (DACS)
ປັດໄຈການຊົດເຊີຍໃນເວລາຈິງ:
ການປ່ຽນແປງຄວາມຮ້ອນກົນຈັກ (ຜ່ານເຄືອຂ່າຍ sensor ອຸນຫະພູມ)
inertia ການເຄື່ອນໄຫວ (ອີງຕາມການຄວບຄຸມ feedforward ຄວາມເລັ່ງ)
ການຜິດປົກກະຕິຂອງ PCB (ຂໍ້ມູນການສະແກນ 3D)
2. ຍຸດທະສາດການຈັດວາງອັດສະລິຍະ
ການຄວບຄຸມການປັບຄວາມກົດດັນ:
ເຕັກໂນໂລຊີລົງຈອດອ່ອນ (<0.1N ຜົນບັງຄັບໃຊ້ການຕິດຕໍ່)
ການຕິດຕາມກວດກາການປ່ຽນຮູບພາບການວາງ solder (ໂດຍຜ່ານເຊັນເຊີ laser displacement)
ຂັ້ນຕອນການຈັດການອົງປະກອບ:
ການຄວບຄຸມການຕ້ານການ flip ອົງປະກອບ asymmetric
ຂັ້ນຕອນການຕ້ານການກະແຈກກະຈາຍຂອງອົງປະກອບຈຸນລະພາກ
VII. ລະບົບບໍາລຸງຮັກສາ
1. ແຜນການບຳລຸງຮັກສາສາມຂັ້ນ
Cycle Item ຈຸດດ້ານວິຊາການ
ການກວດກາການເຮັດຄວາມສະອາດຫົວຫົວປະ ຈຳ ວັນ ໃຊ້ປາກກາເຮັດຄວາມສະອາດພິເສດ (P/N: SIPLACE 488-223) ເພື່ອເຮັດຄວາມສະອາດຝາດ້ານໃນຂອງຫົວຫົວ.
ການກວດສອບປະຈໍາອາທິດ ການກວດສອບລະບົບສູນຍາກາດ ທົດສອບເວລາສ້າງສູນຍາກາດ 16 ຊ່ອງ (ຄ່າມາດຕະຖານ <50ms)
ການບໍາລຸງຮັກສາປະຈໍາເດືອນ ການຫລໍ່ລື່ນຂອງຊິ້ນສ່ວນເຄື່ອນຍ້າຍ ໃຊ້ນໍ້າມັນພິເສດ (Klüberplex BEM 41-132), ປະລິມານ 0.2ml/ຄູ່ມືທາງລົດໄຟ
ການກວດສອບປະຈໍາປີການປັບສົມບູນແບບລວມມີ:
• ການປັບຄວາມຍາວໂຟກັສຂອງລະບົບ Optical
• ການຊົດເຊີຍໄລຍະຕົວເຂົ້າລະຫັດ
• ບັງຄັບການປັບທຽບຈຸດສູນເຊັນເຊີ
2. ການທໍາງານບໍາລຸງຮັກສາທີ່ຄາດເດົາ
ການຕິດຕາມດັດຊະນີສຸຂະພາບ:
ການສວມໃສ່ຂອງ Nozzle (ອີງໃສ່ການວິເຄາະຮູບແບບຄື້ນສູນຍາກາດ)
ການຄາດຄະເນຊີວິດ Bearing (ວິນິດໄສການສັ່ນສະເທືອນ)
ລະບົບເຕືອນໄພອັດສະລິຍະ:
ການເຕືອນຄວາມຜິດກ່ອນໄວອັນຄວນ (ເຊັ່ນ: E710: ຄວາມຜິດປົກກະຕິຂອງແກນ Z)
ການຊຸກຍູ້ການແນະນໍາການບໍາລຸງຮັກສາ (ຜ່ານ ASM Remote Smart Factory)
8. ການບົ່ງມະຕິຄວາມຜິດປົກກະຕິ
1. ຄວາມຜິດທາງກົນຈັກ
ປະກົດການລະຫັດ ການວິເຄາະສາເຫດ ການແກ້ໄຂ
E201 Z-axis servo overload Voice coil motor dissipation heat dissipation is poor ເຮັດຄວາມສະອາດຊ່ອງທາງການກະຈາຍຄວາມຮ້ອນແລະກວດເບິ່ງພັດລົມເຢັນ
E315 θ-axis positioning deviation ສັນຍານຕົວເຂົ້າລະຫັດຖືກຂັດຂວາງກວດສອບສາຍການປ້ອງກັນແລະເຮັດຄືນໃຫມ່ຂອງດິນ
2. ລະບົບສູນຍາກາດລົ້ມເຫຼວ
ປະກົດການລະຫັດ ການວິເຄາະສາເຫດ ການແກ້ໄຂ
E407 ຄວາມລົ້ມເຫຼວຂອງສູນຍາກາດຫຼາຍຊ່ອງ ການກະຈາຍວາວ diaphragm ເສຍຫາຍ ທົດແທນກຸ່ມປ່ຽງ (P/N: SIPLACE 577-991)
E412 Vacuum response delay ການອຸດຕັນບາງສ່ວນຂອງທໍ່ໃຊ້ເຂັມ 0.3mm ເພື່ອເຮັດຄວາມສະອາດ
3. ລະບົບວິໄສທັດລົ້ມເຫຼວ
ປະກົດການລະຫັດ ການວິເຄາະສາເຫດ ການແກ້ໄຂ
E521 ການມົວຮູບພາບມົນລະພິດຂອງກຸ່ມ Lens ຫຼືການຫຼຸດຜ່ອນຄວາມອ່ອນໄຫວຂອງ LED ການທໍາຄວາມສະອາດແສງແບບມືອາຊີບ, ວັດແທກຄວາມເຂັ້ມຂອງແຫຼ່ງແສງສະຫວ່າງ
E533 ຂໍ້ມູນການປັບທຽບຜິດປົກກະຕິ ການຕັ້ງຄ່າຄະນະກໍານົດການປັບທຽບ deviation ການປະຕິບັດການປັບວິໄສທັດຂອງຄວາມຍາວປາ
IX. ການຍົກລະດັບແລະການຄັດເລືອກ
1. ຕົວເລືອກການຂະຫຍາຍຟັງຊັນ
ລະຫັດທາງເລືອກ ຄໍາອະທິບາຍຟັງຊັນ
OPX-014-001 ຊຸດການຈັດວາງລະດັບຄວາມແມ່ນຍໍາສູງ (ລວມທັງ nozzle ລະດັບ nano, ປັບປຸງຄວາມຖືກຕ້ອງເປັນ ±15μm)
OPX-014-003 ຮຸ່ນອຸນຫະພູມສູງ (ສະຫນັບສະຫນູນສະພາບແວດລ້ອມ 85 ℃, ລວມທັງລະບົບການຫລໍ່ລື່ນພິເສດ)
OPX-014-005 ຊຸດຕ້ານການສະຖິດ (ESD<10V, ເຫມາະສໍາລັບອົງປະກອບ RF)
2. ເສັ້ນທາງຍົກລະດັບອັດສະລິຍະ
ການຕອບໂຕ້ອັດສະລິຍະ ASM: ຕົວກໍານົດການຈັດວາງທີ່ອີງໃສ່ AI ການປັບແຕ່ງຕົນເອງ
Digital Twin Kit: Workhead digital twin toolkit
X. ກໍລະນີຄໍາຮ້ອງສະຫມັກ
ແຜນການຕັ້ງຄ່າສາຍການຜະລິດເອເລັກໂຕຣນິກຍານຍົນ:
ການປະສົມປະສານອຸປະກອນ: 4×SIPLACE X4s (ແຕ່ລະອັນມີ 2 ຫົວເຮັດວຽກ CP14)
ສ່ວນປະກອບທົ່ວໄປ:
01005 resistors (60% 0402)
QFN-56 (ສຽງ 0.4 ມມ)
ຕົວເຊື່ອມຕໍ່ແບບພິເສດ (ສູງສຸດ 15 ມມ)
ການປະຕິບັດການວັດແທກ:
OEE ທີ່ສົມບູນແບບ: 92.3%
ໄລຍະເວລາຄວາມລົ້ມເຫລວໂດຍສະເລ່ຍ: 1,750 ຊົ່ວໂມງ
XI. ແນວໂນ້ມການພັດທະນາເຕັກໂນໂລຊີ
ການອອກແບບສີມ້ານ: rod nozzle carbon fiber (ຫຼຸດນ້ໍາ 50%)
ການຄວບຄຸມການເຊື່ອມຕໍ່ພາກສະຫນາມຫຼາຍຟີຊິກ:
ການເພີ່ມປະສິດທິພາບການຮ່ວມມືແບບ vibration-heat-stress
ຄໍາຮ້ອງສະຫມັກ Quantum sensing:
ການວັດແທກຕໍາແຫນ່ງ nanoscale (ຂັ້ນຕອນຕົ້ນແບບ)
ຫົວເຮັດວຽກນີ້ສະແດງເຖິງລະດັບກ້າວຫນ້າທາງດ້ານເຕັກໂນໂລຢີການຈັດວາງ SMT ໃນປະຈຸບັນ. ມັນບັນລຸຄວາມສົມດູນທີ່ສົມບູນແບບລະຫວ່າງຄວາມໄວແລະຄວາມຖືກຕ້ອງໂດຍຜ່ານການເຊື່ອມໂຍງເຕັກໂນໂລຢີທີ່ເລິກເຊິ່ງແລະເປັນການແກ້ໄຂທີ່ຕ້ອງການສໍາລັບການຜະລິດເອເລັກໂຕຣນິກລະດັບສູງ.







