
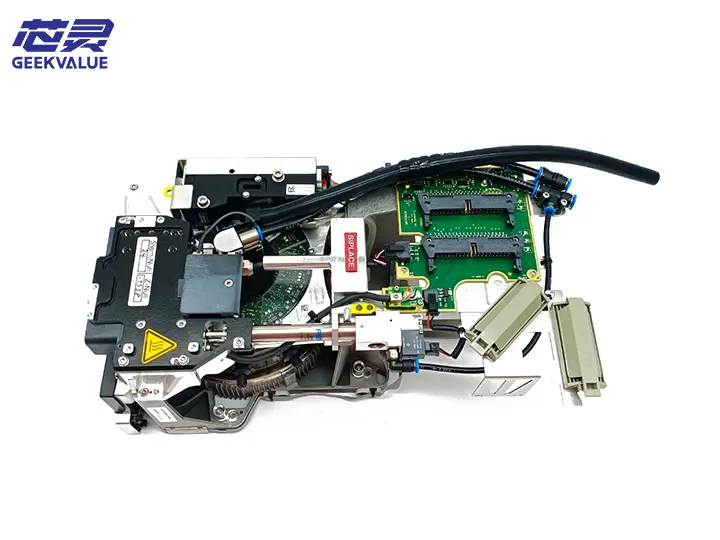
CPP-arbejdshovedet (Component Placement Head) er kernekomponenten i ASM-placeringsmaskinen og er ansvarlig for at opsamle komponenter fra føderen og placere dem præcist på printkortet. CPP-arbejdshovedet fra ASM (nu Siemens Electronic Assembly Systems Division) har et godt ry i SMT-branchen for sin høje præcision, høje hastighed og høje pålidelighed.
2. Strukturel sammensætning
1. Mekanisk struktur
Spindelsystem: inkluderer servomotor, højpræcisionskugleskrue og lineærføring
Dysestang: udskiftelig dysemonteringsstang, normalt med 12 eller 16 stationer
Vakuumsystem: inkluderer vakuumgenerator, vakuumsensor og vakuumkanal
Centreringssystem: visuelt system og mekanisk centreringsklo til komponentcentrering
Z-aksedrev: servo- eller pneumatisk system til styring af placeringshøjden
θ-akse rotation: stepper- eller servomotor til komponentvinkelrotation
2. Elektronisk system
Encodersystem: Encoder med høj opløsning til præcis positionering
Sensorsystem:
Vakuumsensor
Højdesensor
Positionssensor
Temperatursensor
Kontrolkort: dedikeret kontrolkort
3. Hjælpesystem
Dyseudskiftningsanordning: automatisk eller halvautomatisk dyseudskiftningsmekanisme
Rengøringssystem: automatisk dyserengøringsenhed
Smøresystem: automatisk smøreanordning
III. Funktioner og virkninger
Komponentudvælgelse: Præcis udvælgelse af SMD-komponenter med forskellige specifikationer fra føderen
Komponentdetektion: Kontroller, om komponenten opsamles normalt gennem vakuum
Komponentcentrering: Korriger komponentens position og vinkel visuelt eller mekanisk
Præcis placering: Placer komponenten præcist på den angivne position på printkortet med det indstillede tryk og den indstillede vinkel.
Dysestyring: Identificer og udskift automatisk dyser med forskellige specifikationer
Procesovervågning: Realtidsovervågning af forskellige parametre under placeringsprocessen
IV. Almindelige fejl og fejlinformation
1. Mekaniske fejl
E101: Fejl ved overskridelse af Z-aksens grænse - Z-aksens bevægelse overstiger det indstillede område
E205: Dysestang sidder fast - Dysestangen kan ikke bevæge sig normalt op og ned
E307: θ-akse positioneringsfejl - Rotationsaksen kan ikke nå den angivne vinkel
2. Fejl i vakuumsystemet
E401: Fejl i vakuumetablering - Kan ikke etablere tilstrækkeligt vakuum til plukning
E402: Vakuumlækage - vakuummet falder for hurtigt efter sugning
E403: Fejl i vakuumudløsning - komponenten kan ikke udløses efter montering
3. Sensorfejl
E501: Fejl i højdesensor
E502: Tab af encodersignal
E503: Temperaturføler uden for grænsen
4. Fejl i elektronisk system
E601: Fejl i servodrev
E602: Kommunikationsafbrydelse på styrekortet
E603: Unormal strømforsyningsspænding
V. Vedligeholdelsesmetoder
1. Daglig vedligeholdelse
Rengøringsarbejde:
Rengør dysen og dysestangen dagligt
Rengør vakuumfilteret
Fjern støv og rester omkring arbejdshovedet
Smørearbejde:
Smør styreskinnerne og føringsskruerne regelmæssigt i henhold til manualens krav.
Brug den angivne type fedt
Inspektionsarbejde:
Kontroller, om hver sensor fungerer korrekt
Kontroller om trykket i vakuumsystemet er normalt
Kontroller, om der er unormale lyde i hver bevægelig del
2. Regelmæssig vedligeholdelse
Månedlig vedligeholdelse:
Rengør hele arbejdshovedet grundigt
Kontroller og udskift slidte O-ringe
Kalibrer positionsnøjagtigheden for hver akse
Kvartalsvis vedligeholdelse:
Udskift vakuumfilteret
Kontroller og juster remspændingen
Fuldt kalibrere det visuelle system
Årlig vedligeholdelse:
Udskift slidte mekaniske dele
Tjek det elektriske system grundigt
Udfør en omfattende ydeevnetest
VI. Vedligeholdelsesidéer
1. Fejldiagnoseproces
Observer fænomenet: noter fejlkoden og maskinens status
Analyser mulige årsager: List mulige årsager i henhold til manualen og erfaringen
Trin-for-trin fejlfinding: Tjek én efter én fra simpel til kompleks
Verificering og reparation: Test og verificering efter reparation
2. Håndtering af almindelige fejl
Placeringsforskydning:
Kontroller kalibreringen af det visuelle system
Kontroller den mekaniske centreringsmekanisme
Kontroller encodersignalet
Fejl i komponentopsamling:
Tjek vakuumsystemet
Kontroller dysevalg og slid
Kontroller føderens position
Unormal bevægelse:
Kontrollér servodrev og motor
Kontroller mekaniske transmissionskomponenter
Kontroller positionssensoren
3. Vedligeholdelsesforanstaltninger
Sikkerhed først: Udfør mekanisk vedligeholdelse efter strømmen er slukket
Antistatiske foranstaltninger: Tag antistatisk beskyttelse ved håndtering af elektroniske komponenter
Brug originale reservedele: Prøv at bruge originale reservedele
Registrer vedligeholdelsesprocessen: Registrer vedligeholdelsestrinnene og reservedelene i detaljer
VII. Tendenser inden for teknologisk udvikling
Højere hastighed: Anvend lettere design og hurtigere drivsystem
Højere præcision: anvendelse af nanopositioneringsteknologi
Intelligens: Integrer flere sensorer for at opnå prædiktiv vedligeholdelse
Modulært design: praktisk til hurtig udskiftning og reparation
Multifunktionsintegration: Integrer flere detektionsfunktioner i arbejdshovedet
Gennem ovenstående omfattende forståelse af CPP-arbejdshovedets struktur, funktion, vedligeholdelse og reparationsmetoder kan du bedre bruge og vedligeholde ASM-placeringsmaskinen for at sikre en stabil og effektiv drift af produktionslinjen.







