
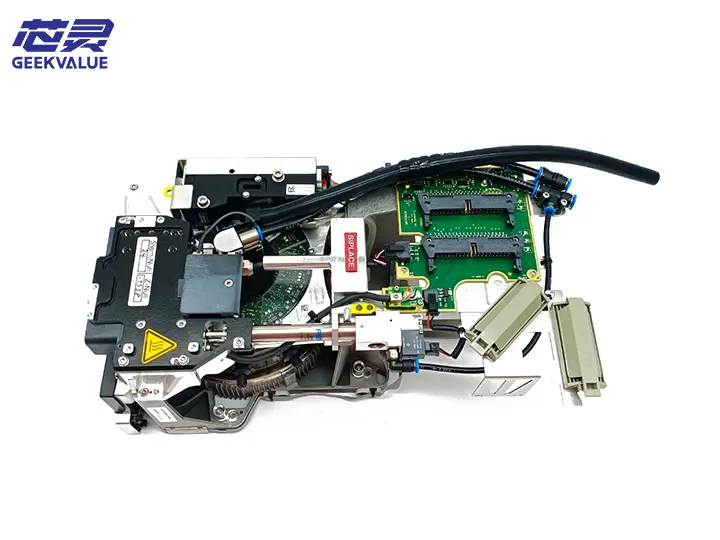
Der CPP-Arbeitskopf (Component Placement Head) ist die Kernkomponente des ASM-Bestückungsautomaten. Er übernimmt die Aufnahme von Bauteilen aus dem Feeder und platziert sie präzise auf der Leiterplatte. Der CPP-Arbeitskopf von ASM (jetzt Siemens Electronic Assembly Systems Division) genießt in der SMT-Branche aufgrund seiner hohen Präzision, Geschwindigkeit und Zuverlässigkeit hohes Ansehen.
2. Strukturelle Zusammensetzung
1. Mechanische Struktur
Spindelsystem: beinhaltet Servomotor, hochpräzise Kugelumlaufspindel und Linearführung
Düsenstange: auswechselbare Düsenmontagestange, meist mit 12 oder 16 Stationen
Vakuumsystem: beinhaltet Vakuumgenerator, Vakuumsensor und Vakuumkanal
Zentriersystem: visuelles System und mechanische Zentrierkralle zur Bauteilzentrierung
Z-Achsen-Antrieb: Servo- oder pneumatisches System zur Steuerung der Platzierungshöhe
θ-Achsen-Rotation: Schritt- oder Servomotor für die Winkelrotation der Komponenten
2. Elektronisches System
Encodersystem: hochauflösender Encoder für präzise Positionierung
Sensorik:
Vakuumsensor
Höhensensor
Positionssensor
Temperatursensor
Steuerplatine: dedizierte Steuerplatine
3. Hilfssystem
Düsenwechselvorrichtung: automatischer oder halbautomatischer Düsenwechselmechanismus
Reinigungssystem: automatische Düsenreinigungsvorrichtung
Schmiersystem: automatische Schmiervorrichtung
III. Funktionen und Wirkungen
Bauteilkommissionierung: Präzises Aufnehmen von SMD-Bauteilen unterschiedlicher Spezifikationen aus dem Feeder
Bauteilerkennung: Prüfen, ob das Bauteil normal durch Vakuum aufgenommen wird
Bauteilzentrierung: Korrigieren Sie die Position und den Winkel des Bauteils optisch oder mechanisch
Präzise Platzierung: Platzieren Sie das Bauteil mit dem eingestellten Druck und Winkel präzise an der angegebenen Position der Leiterplatte
Düsenmanagement: Automatisches Erkennen und Ersetzen von Düsen unterschiedlicher Spezifikationen
Prozessüberwachung: Echtzeitüberwachung verschiedener Parameter während des Bestückungsprozesses
IV. Häufige Fehler und Störungsinformationen
1. Mechanische Ausfälle
E101: Z-Achsen-Übergrenzwertfehler - Die Bewegung der Z-Achse überschreitet den eingestellten Bereich
E205: Düsenstange klemmt – Düsenstange kann sich nicht normal auf und ab bewegen
E307: θ-Achsen-Positionierungsfehler – Rotationsachse kann den angegebenen Winkel nicht erreichen
2. Ausfall des Vakuumsystems
E401: Fehler beim Vakuumaufbau – Es konnte kein ausreichendes Vakuum zum Aufnehmen aufgebaut werden
E402: Vakuumleck – Vakuum fällt nach dem Aufnehmen zu schnell ab
E403: Vakuumfreigabefehler – Komponente kann nach der Montage nicht freigegeben werden
3. Sensorfehler
E501: Höhensensor-Abnormalität
E502: Encoder-Signalverlust
E503: Temperatursensor außerhalb des Grenzwertes
4. Ausfall des elektronischen Systems
E601: Servoantriebsfehler
E602: Kommunikationsunterbrechung der Steuerplatine
E603: Anomalie der Versorgungsspannung
V. Wartungsmethoden
1. Tägliche Wartung
Reinigungsarbeiten:
Reinigen Sie die Düse und den Düsenstab täglich
Reinigen Sie den Staubsaugerfilter
Entfernen Sie Staub und Rückstände rund um den Arbeitskopf
Schmierarbeiten:
Schmieren Sie die Führungsschienen und Leitspindeln regelmäßig gemäß den manuellen Anforderungen
Verwenden Sie die angegebene Fettsorte
Inspektionsarbeiten:
Überprüfen Sie, ob jeder Sensor ordnungsgemäß funktioniert
Überprüfen Sie, ob der Druck im Vakuumsystem normal ist
Überprüfen Sie, ob in jedem beweglichen Teil ungewöhnliche Geräusche auftreten.
2. Regelmäßige Wartung
Monatliche Wartung:
Den gesamten Arbeitskopf gründlich reinigen
Überprüfen und ersetzen Sie verschlissene O-Ringe
Kalibrieren Sie die Positionsgenauigkeit jeder Achse
Vierteljährliche Wartung:
Ersetzen Sie den Vakuumfilter
Riemenspannung prüfen und einstellen
Das visuelle System vollständig kalibrieren
Jährliche Wartung:
Ersetzen Sie verschlissene mechanische Teile
Überprüfen Sie das elektrische System vollständig
Führen Sie einen umfassenden Leistungstest durch
VI. Wartungshinweise
1. Fehlerdiagnoseprozess
Beobachten Sie das Phänomen: Notieren Sie den Fehlercode und den Maschinenstatus
Mögliche Ursachen analysieren: Listen Sie mögliche Ursachen gemäß Handbuch und Erfahrung auf
Schritt-für-Schritt-Fehlerbehebung: Überprüfen Sie Schritt für Schritt, vom Einfachen zum Komplexen
Überprüfen und reparieren: Testen und überprüfen Sie nach der Reparatur
2. Allgemeine Fehlerbehandlung
Platzierungsoffset:
Überprüfen Sie die Kalibrierung des visuellen Systems
Mechanischen Zentriermechanismus prüfen
Encodersignal prüfen
Fehler beim Aufnehmen von Komponenten:
Vakuumsystem prüfen
Düsenauswahl und Verschleiß prüfen
Position des Feeders prüfen
Abnorme Bewegung:
Servoantrieb und Motor prüfen
Mechanische Getriebekomponenten prüfen
Positionssensor prüfen
3. Wartungsvorkehrungen
Sicherheit geht vor: Führen Sie nach dem Ausschalten eine mechanische Wartung durch
Antistatische Maßnahmen: Treffen Sie beim Umgang mit elektronischen Bauteilen antistatische Schutzmaßnahmen
Verwenden Sie Original-Ersatzteile: Versuchen Sie, Original-Ersatzteile zu verwenden
Wartungsvorgang dokumentieren: Wartungsschritte und Ersatzteile detailliert dokumentieren
VII. Trends in der Technologieentwicklung
Höhere Geschwindigkeit: leichteres Design und schnelleres Antriebssystem
Höhere Präzision: Anwendung der Nanopositionierungstechnologie
Intelligenz: Integrieren Sie mehr Sensoren, um eine vorausschauende Wartung zu erreichen
Modulares Design: praktisch für schnellen Austausch und Reparatur
Multifunktionsintegration: Integrieren Sie weitere Erkennungsfunktionen in den Arbeitskopf
Durch das oben beschriebene umfassende Verständnis der Struktur, Funktion, Wartungs- und Reparaturmethoden des CPP-Arbeitskopfes können Sie die ASM-Bestückungsmaschine besser nutzen und warten, um den stabilen und effizienten Betrieb der Produktionslinie sicherzustellen.







