
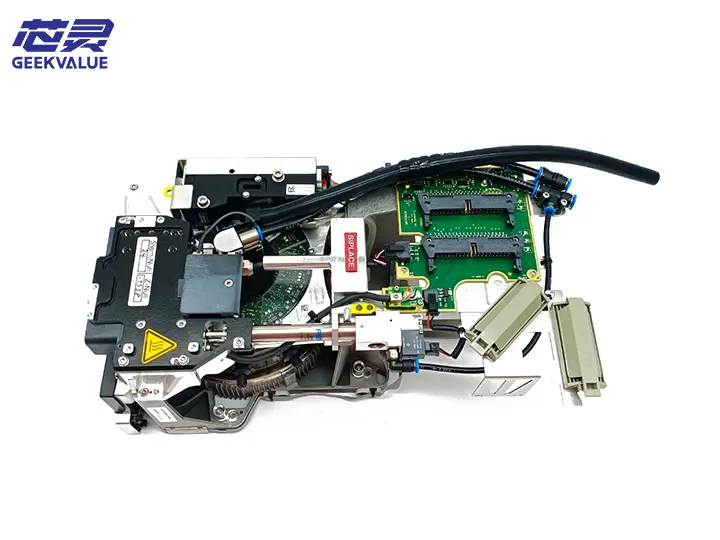
Kepala kerja CPP (Kepala Penempatan Komponen) ialah komponen teras mesin penempatan ASM, bertanggungjawab untuk mengambil komponen daripada penyuap dan meletakkannya dengan tepat pada papan PCB. Ketua kerja CPP ASM (kini Bahagian Sistem Pemasangan Elektronik Siemens) menikmati reputasi tinggi dalam industri SMT untuk ketepatan tinggi, kelajuan tinggi dan kebolehpercayaan yang tinggi.
2. Komposisi struktur
1. Struktur mekanikal
Sistem gelendong: termasuk motor servo, skru bola berketepatan tinggi dan panduan linear
Rod muncung: rod pemasangan muncung boleh diganti, biasanya dengan 12 atau 16 stesen
Sistem vakum: termasuk penjana vakum, sensor vakum dan saluran vakum
Sistem pemusatan: sistem visual dan cakar pemusatan mekanikal untuk pemusatan komponen
Pemacu paksi Z: sistem servo atau pneumatik untuk mengawal ketinggian penempatan
Putaran paksi θ: stepper atau motor servo untuk putaran sudut komponen
2. Sistem elektronik
Sistem pengekod: pengekod resolusi tinggi untuk kedudukan yang tepat
Sistem penderia:
Penderia vakum
Sensor ketinggian
Penderia kedudukan
Penderia suhu
Papan kawalan: papan litar kawalan khusus
3. Sistem bantu
Peranti gantian muncung: mekanisme penggantian muncung automatik atau separa automatik
Sistem pembersihan: peranti pembersihan muncung automatik
Sistem pelinciran: peranti pelinciran automatik
III. Fungsi dan kesan
Pemilihan komponen: Ambil dengan tepat komponen SMD pelbagai spesifikasi daripada penyuap
Pengesanan komponen: Periksa sama ada komponen diambil secara normal melalui vakum
Pemusatan komponen: Betulkan kedudukan dan sudut komponen dengan cara visual atau mekanikal
Peletakan tepat: Letakkan komponen dengan tepat pada kedudukan PCB yang ditentukan dengan tekanan dan sudut yang ditetapkan
Pengurusan muncung: Mengenal pasti dan menggantikan muncung spesifikasi yang berbeza secara automatik
Pemantauan proses: Pemantauan masa nyata pelbagai parameter semasa proses penempatan
IV. Kesilapan biasa dan maklumat kesalahan
1. Kegagalan mekanikal
E101: Ralat lebihan paksi Z - Pergerakan paksi Z melebihi julat yang ditetapkan
E205: Rod muncung tersangkut - Rod muncung tidak boleh bergerak ke atas dan ke bawah seperti biasa
E307: Ralat kedudukan paksi θ - Paksi putaran tidak boleh mencapai sudut yang ditentukan
2. Kegagalan sistem vakum
E401: Kegagalan pembentukan vakum - Tidak dapat mewujudkan vakum yang mencukupi untuk memetik
E402: Kebocoran vakum - vakum jatuh terlalu cepat selepas dipetik
E403: Kegagalan pelepasan vakum - tidak dapat melepaskan komponen selepas dipasang
3. Kegagalan sensor
E501: Keabnormalan sensor ketinggian
E502: Kehilangan isyarat pengekod
E503: Sensor suhu di luar had
4. Kegagalan sistem elektronik
E601: Kegagalan pemacu servo
E602: Gangguan komunikasi papan kawalan
E603: Keabnormalan voltan bekalan kuasa
V. Kaedah penyelenggaraan
1. Penyelenggaraan harian
Kerja pembersihan:
Bersihkan muncung dan batang muncung setiap hari
Bersihkan penapis vakum
Keluarkan habuk dan sisa di sekeliling kepala kerja
Kerja pelinciran:
Pelincir rel panduan dan skru plumbum dengan kerap mengikut keperluan manual
Gunakan jenis gris yang ditentukan
Kerja pemeriksaan:
Periksa sama ada setiap sensor berfungsi dengan betul
Periksa sama ada tekanan sistem vakum adalah normal
Periksa sama ada terdapat bunyi yang tidak normal pada setiap bahagian yang bergerak
2. Penyelenggaraan tetap
Penjagaan bulanan:
Bersihkan seluruh kepala kerja dengan teliti
Periksa dan gantikan cincin-O yang haus
Kalibrasi ketepatan kedudukan setiap paksi
Penjagaan kuartal:
Gantikan penapis vakum
Periksa dan laraskan ketegangan tali pinggang
Kalibrasi sepenuhnya sistem visual
Penyelenggaraan tahunan:
Gantikan bahagian mekanikal yang haus
Periksa sepenuhnya sistem elektrik
Lakukan ujian prestasi menyeluruh
VI. Idea penyelenggaraan
1. Proses diagnosis kerosakan
Perhatikan fenomena: rekod kod kerosakan dan status mesin
Menganalisis kemungkinan sebab: Senaraikan kemungkinan penyebab mengikut manual dan pengalaman
Penyelesaian masalah langkah demi langkah: Semak satu demi satu daripada mudah kepada kompleks
Sahkan dan baiki: Uji dan sahkan selepas pembaikan
2. Pengendalian kerosakan biasa
Offset peletakan:
Semak penentukuran sistem visual
Periksa mekanisme pemusatan mekanikal
Periksa isyarat pengekod
Kegagalan pengambilan komponen:
Periksa sistem vakum
Periksa pemilihan muncung dan kehausan
Periksa kedudukan penyuap
Pergerakan tidak normal:
Periksa pemacu servo dan motor
Periksa komponen penghantaran mekanikal
Periksa sensor kedudukan
3. Langkah berjaga-jaga penyelenggaraan
Keselamatan diutamakan: Lakukan penyelenggaraan mekanikal selepas kuasa dimatikan
Langkah anti-statik: Ambil perlindungan anti-statik apabila mengendalikan komponen elektronik
Gunakan alat ganti tulen: Cuba gunakan alat ganti asli
Rekod proses penyelenggaraan: Rekodkan langkah penyelenggaraan dan alat ganti secara terperinci
VII. Trend Pembangunan Teknologi
Kelajuan yang lebih tinggi: menggunakan reka bentuk yang lebih ringan dan sistem pemanduan yang lebih pantas
Ketepatan lebih tinggi: penggunaan teknologi penentududukan nano
Kepintaran: menyepadukan lebih banyak penderia untuk mencapai penyelenggaraan ramalan
Reka bentuk modular: mudah untuk penggantian dan pembaikan yang cepat
Penyepaduan pelbagai fungsi: integrasikan lebih banyak fungsi pengesanan ke dalam kepala kerja
Melalui pemahaman menyeluruh mengenai struktur, fungsi, penyelenggaraan dan kaedah pembaikan ketua kerja CPP di atas, anda boleh menggunakan dan menyelenggara mesin peletakan ASM dengan lebih baik untuk memastikan operasi barisan pengeluaran yang stabil dan cekap.







