
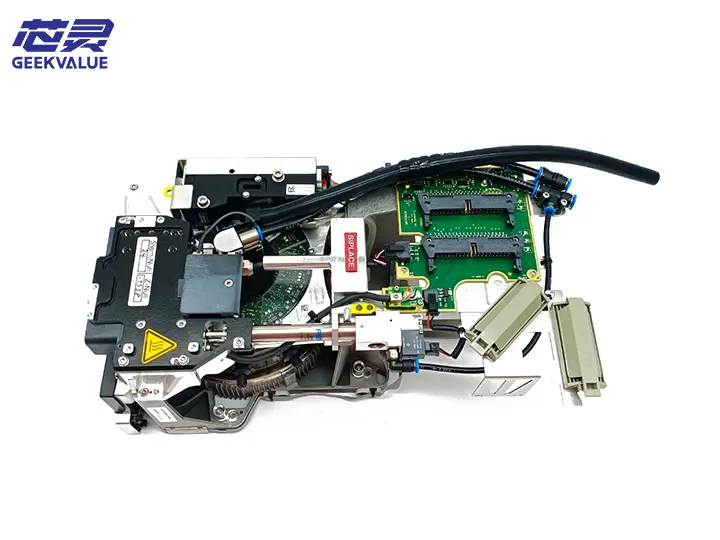
KPP (komponentu izvietošanas galvas) darba galva ir ASM izvietošanas iekārtas galvenā sastāvdaļa, kas atbild par komponentu paņemšanu no padevēja un precīzu novietošanu uz PCB plates. ASM (tagad Siemens Electronic Assembly Systems Division) KPP darba galvai ir augsta reputācija SMT nozarē, pateicoties tās augstajai precizitātei, ātrumam un uzticamībai.
2. Strukturālais sastāvs
1. Mehāniskā struktūra
Vārpstas sistēma: ietver servomotoru, augstas precizitātes lodīšu skrūvi un lineāro vadotni
Sprauslas stienis: nomaināms sprauslas stiprinājuma stienis, parasti ar 12 vai 16 stacijām
Vakuuma sistēma: ietver vakuuma ģeneratoru, vakuuma sensoru un vakuuma kanālu
Centrēšanas sistēma: vizuālā sistēma un mehāniskā centrēšanas knaibles komponentu centrēšanai
Z ass piedziņa: servo vai pneimatiskā sistēma novietojuma augstuma kontrolei
θ ass rotācija: soļu vai servo motors komponentu leņķa rotācijai
2. Elektroniskā sistēma
Kodētāja sistēma: augstas izšķirtspējas kodētājs precīzai pozicionēšanai
Sensoru sistēma:
Vakuuma sensors
Augstuma sensors
Pozīcijas sensors
Temperatūras sensors
Vadības plate: īpaša vadības shēmas plate
3. Palīgierīce
Sprauslu nomaiņas ierīce: automātisks vai pusautomātisks sprauslu nomaiņas mehānisms
Tīrīšanas sistēma: automātiska sprauslu tīrīšanas ierīce
Eļļošanas sistēma: automātiska eļļošanas ierīce
III. Funkcijas un ietekme
Komponentu atlasīšana: precīzi paņemiet dažādu specifikāciju SMD komponentus no padevēja
Komponentu noteikšana: pārbaudiet, vai komponents tiek uztverts normāli, izmantojot vakuumu
Komponentu centrēšana: Koriģējiet komponenta pozīciju un leņķi ar vizuāliem vai mehāniskiem līdzekļiem.
Precīza novietošana: precīzi novietojiet komponentu norādītajā PCB pozīcijā ar iestatīto spiedienu un leņķi
Sprauslu pārvaldība: automātiski identificē un nomaina dažādu specifikāciju sprauslas
Procesa uzraudzība: dažādu parametru uzraudzība reāllaikā izvietošanas procesa laikā
IV. Biežāk sastopamās kļūdas un informācija par kļūmēm
1. Mehāniski bojājumi
E101: Z ass pārsniegšanas kļūda — Z ass kustība pārsniedz iestatīto diapazonu
E205: Sprauslas stienis iestrēdzis — Sprauslas stienis nevar normāli kustēties uz augšu un uz leju
E307: θ ass pozicionēšanas kļūda — Rotācijas ass nevar sasniegt norādīto leņķi
2. Vakuuma sistēmas kļūme
E401: Vakuuma izveides kļūme — Nav iespējams izveidot pietiekamu vakuumu komplektēšanai
E402: Vakuuma noplūde — vakuums pēc paņemšanas pārāk ātri nolaižas
E403: Vakuuma atbrīvošanas kļūme — pēc uzstādīšanas nevar atbrīvot komponentu
3. Sensora kļūme
E501: Augstuma sensora anomālija
E502: Kodētāja signāla zudums
E503: Temperatūras sensors ārpus robežvērtībām
4. Elektroniskās sistēmas kļūme
E601: Servo piedziņas kļūme
E602: Vadības plates komunikācijas pārtraukums
E603: Barošanas sprieguma anomālija
V. Apkopes metodes
1. Ikdienas apkope
Tīrīšanas darbi:
Katru dienu tīriet sprauslu un sprauslas stieni
Notīriet putekļsūcēja filtru
Noņemiet putekļus un atlikumus ap darba galvu
Eļļošanas darbi:
Regulāri ieeļļojiet vadsliedes un vadskrūves saskaņā ar rokasgrāmatas prasībām.
Izmantojiet norādīto smērvielas veidu
Pārbaudes darbs:
Pārbaudiet, vai katrs sensors darbojas pareizi
Pārbaudiet, vai vakuuma sistēmas spiediens ir normāls
Pārbaudiet, vai katrā kustīgajā daļā nav dzirdamas neparastas skaņas.
2. Regulāra apkope
Ikmēneša apkope:
Rūpīgi notīriet visu darba galvu
Pārbaudiet un nomainiet nolietotos O veida gredzenus
Kalibrējiet katras ass pozīcijas precizitāti
Ceturkšņa apkope:
Nomainiet vakuuma filtru
Pārbaudiet un noregulējiet siksnas spriegojumu
Pilnībā kalibrējiet vizuālo sistēmu
Ikgadējā apkope:
Nomainiet nolietotās mehāniskās detaļas
Pilnībā pārbaudiet elektrisko sistēmu
Veiciet visaptverošu veiktspējas pārbaudi
VI. Apkopes idejas
1. Kļūmju diagnostikas process
Novērojiet parādību: pierakstiet kļūdas kodu un iekārtas statusu
Analizējiet iespējamos cēloņus: uzskaitiet iespējamos cēloņus saskaņā ar rokasgrāmatu un pieredzi.
Soli pa solim problēmu novēršana: pārbaudiet pa vienam, sākot no vienkārša līdz sarežģītam
Pārbaude un remonts: Pārbaudiet un pārbaudiet pēc remonta
2. Biežāk sastopamo kļūmju apstrāde
Novietojuma nobīde:
Pārbaudiet vizuālās sistēmas kalibrēšanu
Pārbaudiet mehānisko centrēšanas mehānismu
Pārbaudiet kodētāja signālu
Komponentu uztveršanas kļūme:
Pārbaudiet vakuuma sistēmu
Pārbaudiet sprauslas izvēli un nodilumu
Pārbaudiet padevēja pozīciju
Nenormāla kustība:
Pārbaudiet servo piedziņu un motoru
Pārbaudiet mehāniskās transmisijas komponentus
Pārbaudiet pozīcijas sensoru
3. Apkopes piesardzības pasākumi
Drošība pirmajā vietā: veiciet mehānisko apkopi pēc strāvas izslēgšanas
Antistatiskie pasākumi: rīkojoties ar elektroniskām detaļām, izmantojiet antistatisko aizsardzību.
Izmantojiet oriģinālās rezerves daļas: Centieties izmantot oriģinālās rezerves daļas
Apkopes procesa reģistrēšana: Detalizēti reģistrējiet apkopes darbības un rezerves daļas.
VII. Tehnoloģiju attīstības tendences
Lielāks ātrums: izmantojiet vieglāku dizainu un ātrāku piedziņas sistēmu
Augstāka precizitāte: nanopozicionēšanas tehnoloģijas pielietošana
Inteliģence: integrējiet vairāk sensoru, lai nodrošinātu paredzamo apkopi
Modulārs dizains: ērts ātrai nomaiņai un remontam
Daudzfunkciju integrācija: integrējiet darba galvā vairāk noteikšanas funkciju
Pateicoties iepriekš minētajai visaptverošajai izpratnei par CPP darba galvas struktūru, funkciju, apkopi un remonta metodēm, jūs varat labāk izmantot un uzturēt ASM izvietošanas mašīnu, lai nodrošinātu ražošanas līnijas stabilu un efektīvu darbību.







