
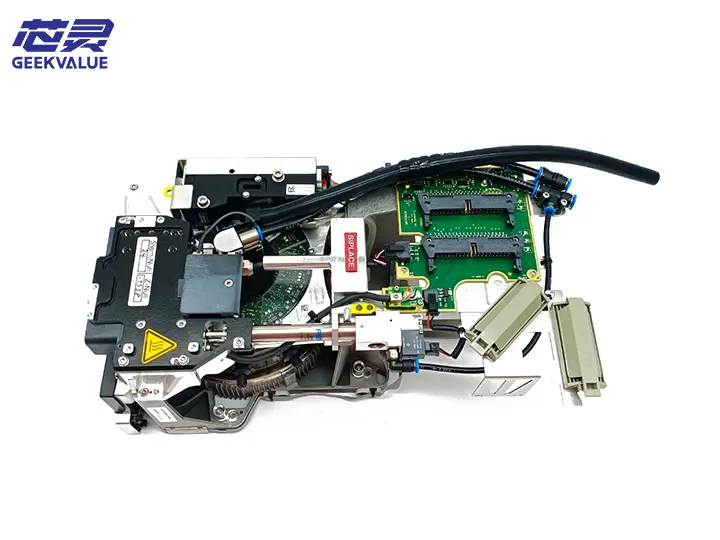
Ang ulo ng trabaho ng CPP (Component Placement Head) ay ang pangunahing bahagi ng ASM placement machine, na responsable sa pagkuha ng mga bahagi mula sa feeder at tumpak na paglalagay ng mga ito sa PCB board. Ang CPP work head ng ASM (ngayon ay Siemens Electronic Assembly Systems Division) ay nagtatamasa ng mataas na reputasyon sa industriya ng SMT para sa kanyang mataas na katumpakan, mataas na bilis at mataas na pagiging maaasahan.
2. Komposisyon sa istruktura
1. Mekanikal na istraktura
Spindle system: may kasamang servo motor, high-precision ball screw at linear guide
Nozzle rod: mapapalitang nozzle mounting rod, karaniwang may 12 o 16 na istasyon
Vacuum system: may kasamang vacuum generator, vacuum sensor at vacuum channel
Centering system: visual system at mechanical centering claw para sa component centering
Z-axis drive: servo o pneumatic system para kontrolin ang taas ng pagkakalagay
Pag-ikot ng θ-axis: stepper o servo motor para sa pag-ikot ng anggulo ng bahagi
2. Electronic system
Encoder system: high-resolution na encoder para sa tumpak na pagpoposisyon
Sistema ng sensor:
Vacuum sensor
Sensor ng taas
Sensor ng posisyon
Sensor ng temperatura
Control board: nakalaang control circuit board
3. Auxiliary system
Nozzle replacement device: awtomatiko o semi-awtomatikong mekanismo ng pagpapalit ng nozzle
Sistema ng paglilinis: awtomatikong aparato sa paglilinis ng nozzle
Sistema ng pagpapadulas: awtomatikong kagamitan sa pagpapadulas
III. Mga function at epekto
Pagpili ng bahagi: Tumpak na kunin ang mga bahagi ng SMD ng iba't ibang mga detalye mula sa feeder
Component detection: Suriin kung ang bahagi ay karaniwang kinuha sa pamamagitan ng vacuum
Pagsentro ng bahagi: Iwasto ang posisyon at anggulo ng bahagi sa pamamagitan ng visual o mekanikal na paraan
Tumpak na pagkakalagay: Tumpak na ilagay ang bahagi sa tinukoy na posisyon ng PCB na may nakatakdang presyon at anggulo
Pamamahala ng nozzle: Awtomatikong tukuyin at palitan ang mga nozzle ng iba't ibang mga detalye
Pagsubaybay sa proseso: Real-time na pagsubaybay sa iba't ibang mga parameter sa panahon ng proseso ng paglalagay
IV. Mga karaniwang error at impormasyon ng pagkakamali
1. Mga mekanikal na pagkabigo
E101: Z-axis over-limit error - Ang paggalaw ng Z-axis ay lumampas sa itinakdang hanay
E205: Na-stuck ang nozzle rod - Ang nozzle rod ay hindi maaaring gumalaw pataas at pababa nang normal
E307: Error sa pagpoposisyon ng θ-axis - Hindi maabot ng rotation axis ang tinukoy na anggulo
2. Pagkabigo ng vacuum system
E401: Kabiguan sa pagtatatag ng vacuum - Hindi makapagtatag ng sapat na vacuum para sa pagpili
E402: Vacuum leak - masyadong mabilis na bumaba ang vacuum pagkatapos pumili
E403: Kabiguan sa pag-release ng vacuum - hindi ma-release ang bahagi pagkatapos i-mount
3. Pagkabigo ng sensor
E501: Abnormalidad ng sensor ng taas
E502: Pagkawala ng signal ng encoder
E503: Lampas sa limitasyon ang sensor ng temperatura
4. Kabiguan ng electronic system
E601: Pagkabigo ng servo drive
E602: Pagkagambala sa komunikasyon ng control board
E603: Abnormalidad ng boltahe ng supply ng kuryente
V. Mga paraan ng pagpapanatili
1. Pang-araw-araw na pagpapanatili
Paglilinis ng trabaho:
Linisin ang nozzle at nozzle rod araw-araw
Linisin ang vacuum filter
Alisin ang alikabok at nalalabi sa paligid ng ulo ng trabaho
Trabaho ng pagpapadulas:
Regular na mag-lubricate ang guide rails at lead screws ayon sa manual na kinakailangan
Gamitin ang tinukoy na uri ng grasa
Gawain ng inspeksyon:
Suriin kung gumagana nang maayos ang bawat sensor
Suriin kung normal ang presyon ng vacuum system
Suriin kung may mga abnormal na tunog sa bawat gumagalaw na bahagi
2. Regular na pagpapanatili
Buwanang pagpapanatili:
Linisin nang lubusan ang buong ulo ng trabaho
Suriin at palitan ang mga pagod na O-ring
I-calibrate ang katumpakan ng posisyon ng bawat axis
Quarterly maintenance:
Palitan ang vacuum filter
Suriin at ayusin ang pag-igting ng sinturon
Ganap na i-calibrate ang visual system
Taunang pagpapanatili:
Palitan ang mga sira na mekanikal na bahagi
Ganap na suriin ang sistema ng kuryente
Magsagawa ng komprehensibong pagsubok sa pagganap
VI. Mga ideya sa pagpapanatili
1. Proseso ng diagnosis ng fault
Obserbahan ang phenomenon: itala ang fault code at status ng makina
Suriin ang mga posibleng dahilan: Ilista ang mga posibleng dahilan ayon sa manwal at karanasan
Hakbang-hakbang na pag-troubleshoot: Isa-isang suriin mula sa simple hanggang sa kumplikado
I-verify at ayusin: Subukan at i-verify pagkatapos ayusin
2. Karaniwang paghawak ng fault
Offset ng placement:
Suriin ang pagkakalibrate ng visual system
Suriin ang mekanikal na mekanismo ng pagsentro
Suriin ang signal ng encoder
Nabigo ang pagkuha ng bahagi:
Suriin ang vacuum system
Suriin ang pagpili at pagsusuot ng nozzle
Suriin ang posisyon ng feeder
Abnormal na paggalaw:
Suriin ang servo drive at motor
Suriin ang mga bahagi ng mekanikal na paghahatid
Suriin ang sensor ng posisyon
3. Mga pag-iingat sa pagpapanatili
Pangkaligtasan muna: Magsagawa ng mekanikal na pagpapanatili pagkatapos patayin
Mga anti-static na hakbang: Kumuha ng anti-static na proteksyon kapag humahawak ng mga elektronikong bahagi
Gumamit ng mga tunay na ekstrang bahagi: Subukang gumamit ng orihinal na mga ekstrang bahagi
Itala ang proseso ng pagpapanatili: Itala ang mga hakbang sa pagpapanatili at mga kapalit na bahagi nang detalyado
VII. Mga Uso sa Pag-unlad ng Teknolohiya
Mas mataas na bilis: gumamit ng mas magaan na disenyo at mas mabilis na sistema ng pagmamaneho
Mas mataas na katumpakan: application ng nano-positioning technology
Intelligence: isama ang higit pang mga sensor para makamit ang predictive na pagpapanatili
Modular na disenyo: maginhawa para sa mabilis na pagpapalit at pagkumpuni
Multi-function integration: isama ang higit pang mga function ng detection sa work head
Sa pamamagitan ng komprehensibong pag-unawa sa itaas ng istraktura, pag-andar, pagpapanatili at mga paraan ng pagkumpuni ng CPP work head, mas mahusay mong magagamit at mapanatili ang ASM placement machine upang matiyak ang matatag at mahusay na operasyon ng linya ng produksyon.







