
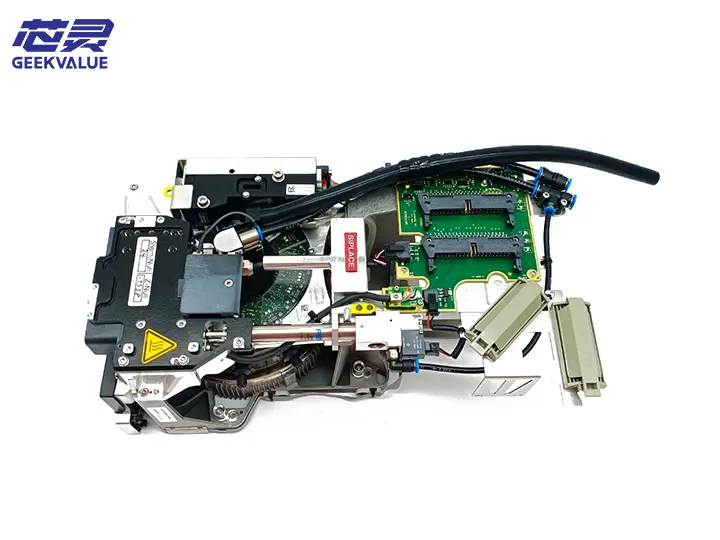
Робоча головка CPP (головка розміщення компонентів) є основним компонентом верстата для розміщення ASM, який відповідає за захоплення компонентів з подавача та точне розміщення їх на друкованій платі. Робоча головка CPP компанії ASM (тепер підрозділ електронних складальних систем Siemens) користується високою репутацією в галузі поверхневого монтажу (SMT) завдяки своїй високій точності, високій швидкості та високій надійності.
2. Структурний склад
1. Механічна структура
Шпиндельна система: включає серводвигун, високоточний кульковий гвинт та лінійну напрямну
Штанга форсунки: змінна штанга кріплення форсунки, зазвичай з 12 або 16 станціями
Вакуумна система: включає вакуумний генератор, вакуумний датчик та вакуумний канал
Система центрування: візуальна система та механічний центрувальний кіготь для центрування компонентів
Привід по осі Z: серво- або пневматична система для керування висотою розміщення
Обертання по осі θ: кроковий або серводвигун для кутового обертання компонента
2. Електронна система
Система енкодера: енкодер високої роздільної здатності для точного позиціонування
Сенсорна система:
Вакуумний датчик
Датчик висоти
Датчик положення
Датчик температури
Плата керування: спеціальна плата керування
3. Допоміжна система
Пристрій для заміни форсунок: автоматичний або напівавтоматичний механізм заміни форсунок
Система очищення: автоматичний пристрій для очищення форсунок
Система змащення: автоматичний пристрій змащення
III. Функції та ефекти
Вибір компонентів: Точне вилучення SMD-компонентів різних специфікацій з подавача
Виявлення компонента: Перевірте, чи компонент нормально підхоплюється вакуумом
Центрування компонента: Виправлення положення та кута компонента візуальними або механічними засобами
Точне розміщення: Точно розмістіть компонент у вказаному положенні друкованої плати з заданим тиском та кутом
Керування форсунками: автоматичне визначення та заміна форсунок різних специфікацій
Моніторинг процесу: моніторинг різних параметрів у режимі реального часу під час процесу розміщення
IV. Поширені помилки та інформація про несправності
1. Механічні пошкодження
E101: Помилка перевищення межі осі Z - рух осі Z перевищує встановлений діапазон
E205: Застряг шток форсунки - Шток форсунки не може нормально рухатися вгору та вниз
E307: Помилка позиціонування осі θ - Вісь обертання не може досягти заданого кута
2. Відмова вакуумної системи
E401: Збій встановлення вакууму - Не вдається встановити достатній вакуум для збирання
E402: Витік вакууму - вакуум падає занадто швидко після збирання
E403: Помилка вакуумного розблокування — неможливо розблокувати компонент після монтажу
3. Відмова датчика
E501: Несправність датчика висоти
E502: Втрата сигналу енкодера
E503: Датчик температури поза межами допустимого значення
4. Збій електронної системи
E601: Збій сервоприводу
E602: Переривання зв'язку з платою керування
E603: Аномалія напруги живлення
V. Методи технічного обслуговування
1. Щоденне обслуговування
Роботи з прибирання:
Щодня очищуйте сопло та шток сопла
Очистіть фільтр пилососа
Видаліть пил та залишки навколо робочої головки
Мастильні роботи:
Регулярно змащуйте напрямні рейки та ходові гвинти відповідно до вимог інструкції
Використовуйте зазначений тип мастила
Інспекційні роботи:
Перевірте, чи кожен датчик працює належним чином
Перевірте, чи тиск у вакуумній системі є нормальним
Перевірте, чи немає незвичних звуків у кожній рухомій частині
2. Регулярне обслуговування
Місячне підтримка:
Ретельно очистіть всю робочу головку
Перевірте та замініть зношені кільця ущільнювачів
Калібрування точності положення кожної осі
Четвертична підтримка:
Замініть вакуумний фільтр
Перевірте та відрегулюйте натяг ременя
Повне калібрування зорової системи
Щорічне обслуговування:
Замініть зношені механічні деталі
Повністю перевірте електричну систему
Проведіть комплексне тестування продуктивності
VI. Ідеї з технічного обслуговування
1. Процес діагностики несправностей
Спостерігайте за явищем: запишіть код несправності та стан машини
Проаналізуйте можливі причини: перелічіть можливі причини відповідно до інструкції та досвіду
Покрокове усунення несправностей: перевірте покроково, від простого до складного
Перевірка та ремонт: Тестування та перевірка після ремонту
2. Обробка поширених несправностей
Зміщення розміщення:
Перевірте калібрування візуальної системи
Перевірте механічний центрувальний механізм
Перевірте сигнал енкодера
Збій захвату компонента:
Перевірте вакуумну систему
Перевірте вибір та знос форсунок
Перевірте положення подачі
Аномальний рух:
Перевірте сервопривід та двигун
Перевірте компоненти механічної коробки передач
Перевірте датчик положення
3. Запобіжні заходи щодо технічного обслуговування
Безпека понад усе: Виконуйте механічне технічне обслуговування після вимкнення живлення
Антистатичні заходи: Використовуйте антистатичний захист під час роботи з електронними компонентами
Використовуйте оригінальні запасні частини: Намагайтеся використовувати оригінальні запасні частини
Записуйте процес технічного обслуговування: детально записуйте етапи технічного обслуговування та необхідні запасні частини
VII. Тенденції розвитку технологій
Вища швидкість: легша конструкція та швидша система приводу
Вища точність: застосування технології нанопозиціонування
Інтелект: інтеграція більшої кількості датчиків для досягнення прогнозного обслуговування
Модульна конструкція: зручна для швидкої заміни та ремонту
Багатофункціональна інтеграція: інтегруйте більше функцій виявлення в робочу головку
Завдяки вищезазначеному всебічному розумінню структури, функцій, методів технічного обслуговування та ремонту робочої головки CPP, ви можете краще використовувати та обслуговувати машину для розміщення ASM, щоб забезпечити стабільну та ефективну роботу виробничої лінії.







