
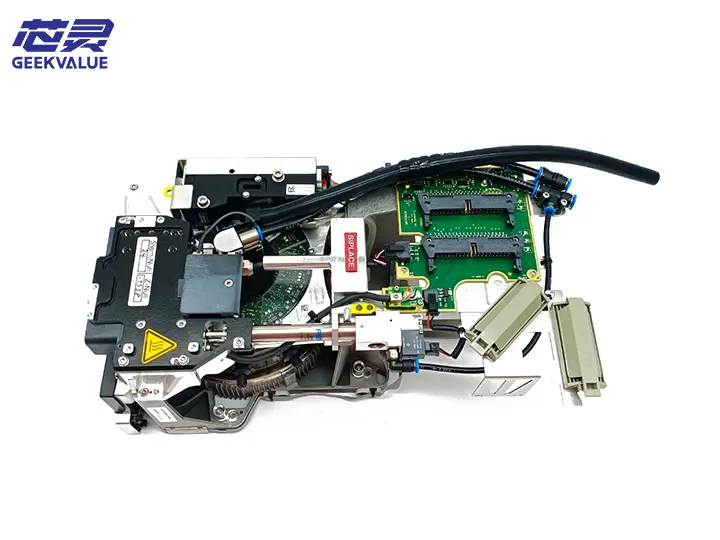
Kepala kerja CPP (Component Placement Head) merupakan komponen inti dari mesin penempatan ASM, yang bertanggung jawab untuk mengambil komponen dari pengumpan dan menempatkannya secara akurat pada papan PCB. Kepala kerja CPP dari ASM (sekarang Divisi Sistem Perakitan Elektronik Siemens) memiliki reputasi tinggi di industri SMT karena presisinya yang tinggi, kecepatannya yang tinggi, dan keandalannya yang tinggi.
2. Komposisi Struktural
1. Struktur Mekanik
Sistem spindel: termasuk motor servo, sekrup bola presisi tinggi, dan pemandu linier
Batang nosel: batang pemasangan nosel yang dapat diganti, biasanya dengan 12 atau 16 stasiun
Sistem vakum: termasuk generator vakum, sensor vakum, dan saluran vakum
Sistem pemusatan: sistem visual dan cakar pemusatan mekanis untuk pemusatan komponen
Penggerak sumbu Z: sistem servo atau pneumatik untuk mengontrol ketinggian penempatan
Rotasi sumbu θ: motor stepper atau servo untuk rotasi sudut komponen
2. Sistem elektronik
Sistem encoder: encoder resolusi tinggi untuk posisi yang tepat
Sistem sensor:
Sensor vakum
Sensor ketinggian
Sensor posisi
Sensor suhu
Papan kontrol: papan sirkuit kontrol khusus
3. Sistem bantu
Perangkat pengganti nosel: mekanisme penggantian nosel otomatis atau semi-otomatis
Sistem pembersihan: perangkat pembersih nosel otomatis
Sistem pelumasan: perangkat pelumasan otomatis
III. Fungsi dan Efeknya
Pemilihan komponen: Mengambil komponen SMD dengan berbagai spesifikasi secara akurat dari pengumpan
Deteksi komponen: Periksa apakah komponen diambil secara normal melalui vakum
Pemusatan komponen: Perbaiki posisi dan sudut komponen dengan cara visual atau mekanis
Penempatan yang tepat: Tempatkan komponen secara akurat pada posisi PCB yang ditentukan dengan tekanan dan sudut yang ditentukan
Manajemen nosel: Secara otomatis mengidentifikasi dan mengganti nosel dengan spesifikasi berbeda
Pemantauan proses: Pemantauan berbagai parameter secara real-time selama proses penempatan
IV. Kesalahan umum dan informasi kesalahan
1. Kegagalan mekanis
E101: Kesalahan batas sumbu Z - Pergerakan sumbu Z melebihi rentang yang ditetapkan
E205: Batang nosel macet - Batang nosel tidak dapat bergerak ke atas dan ke bawah secara normal
E307: Kesalahan posisi sumbu θ - Sumbu rotasi tidak dapat mencapai sudut yang ditentukan
2. Kegagalan sistem vakum
E401: Kegagalan pembentukan vakum - Tidak dapat membentuk vakum yang cukup untuk pengambilan
E402: Kebocoran vakum - vakum turun terlalu cepat setelah diambil
E403: Kegagalan pelepasan vakum - tidak dapat melepaskan komponen setelah pemasangan
3. Kegagalan sensor
E501: Kelainan sensor ketinggian
E502: Kehilangan sinyal encoder
E503: Sensor suhu di luar batas
4. Kegagalan sistem elektronik
E601: Kegagalan penggerak servo
E602: Gangguan komunikasi pada papan kontrol
E603: Kelainan tegangan catu daya
V. Metode pemeliharaan
1. Perawatan harian
Pekerjaan pembersihan:
Bersihkan nosel dan batang nosel setiap hari
Bersihkan filter vakum
Bersihkan debu dan residu di sekitar kepala kerja
Pekerjaan pelumasan:
Lumasi rel pemandu dan sekrup utama secara teratur sesuai dengan persyaratan manual
Gunakan jenis gemuk yang ditentukan
Pekerjaan inspeksi:
Periksa apakah setiap sensor berfungsi dengan baik
Periksa apakah tekanan sistem vakum normal
Periksa apakah ada suara abnormal pada setiap bagian yang bergerak
2. Perawatan rutin
Pertahanan bulanan:
Bersihkan seluruh kepala kerja secara menyeluruh
Periksa dan ganti O-ring yang sudah aus
Kalibrasi akurasi posisi setiap sumbu
Penjagaan kuartal:
Ganti filter vakum
Periksa dan sesuaikan ketegangan sabuk
Kalibrasi sistem visual sepenuhnya
Pemeliharaan tahunan:
Ganti bagian mekanis yang sudah usang
Periksa sistem kelistrikan secara menyeluruh
Lakukan uji kinerja yang komprehensif
VI. Ide pemeliharaan
1. Proses diagnosis kesalahan
Amati fenomena: catat kode kesalahan dan status mesin
Menganalisis kemungkinan penyebab: Buat daftar kemungkinan penyebab menurut manual dan pengalaman
Pemecahan masalah langkah demi langkah: Periksa satu per satu dari yang sederhana hingga yang rumit
Verifikasi dan perbaikan: Uji dan verifikasi setelah perbaikan
2. Penanganan kesalahan umum
Offset penempatan:
Periksa kalibrasi sistem visual
Periksa mekanisme pemusatan mekanis
Periksa sinyal encoder
Kegagalan pengambilan komponen:
Periksa sistem vakum
Periksa pemilihan dan keausan nosel
Periksa posisi pengumpan
Gerakan abnormal:
Periksa penggerak servo dan motor
Periksa komponen transmisi mekanis
Periksa sensor posisi
3. Tindakan pencegahan pemeliharaan
Keselamatan adalah yang utama: Lakukan perawatan mekanis setelah daya mati
Tindakan antistatis: Gunakan perlindungan antistatis saat menangani komponen elektronik
Gunakan suku cadang asli: Usahakan menggunakan suku cadang asli
Catat proses perawatan: Catat langkah-langkah perawatan dan suku cadang pengganti secara rinci
VII. Tren Pengembangan Teknologi
Kecepatan lebih tinggi: mengadopsi desain yang lebih ringan dan sistem penggerak yang lebih cepat
Presisi yang lebih tinggi: penerapan teknologi penentuan posisi nano
Kecerdasan: integrasikan lebih banyak sensor untuk mencapai pemeliharaan prediktif
Desain modular: nyaman untuk penggantian dan perbaikan cepat
Integrasi multifungsi: mengintegrasikan lebih banyak fungsi deteksi ke dalam kepala kerja
Melalui pemahaman komprehensif di atas tentang struktur, fungsi, pemeliharaan, dan metode perbaikan kepala kerja CPP, Anda dapat menggunakan dan memelihara mesin penempatan ASM dengan lebih baik untuk memastikan operasi lini produksi yang stabil dan efisien.







