
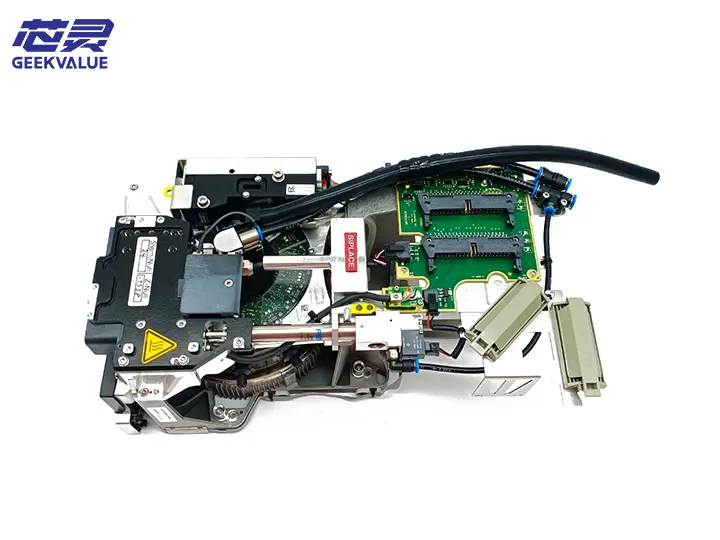
CPP-arbeidshodet (Component Placement Head) er kjernekomponenten i ASM-plasseringsmaskinen, og er ansvarlig for å plukke opp komponenter fra materen og plassere dem nøyaktig på PCB-kortet. CPP-arbeidshodet til ASM (nå Siemens Electronic Assembly Systems Division) har et godt rykte i SMT-bransjen for sin høye presisjon, høye hastighet og høye pålitelighet.
2. Strukturell sammensetning
1. Mekanisk struktur
Spindelsystem: inkluderer servomotor, høypresisjons kuleskrue og lineærføring
Dysestang: utskiftbar dysemonteringsstang, vanligvis med 12 eller 16 stasjoner
Vakuumsystem: inkluderer vakuumgenerator, vakuumsensor og vakuumkanal
Sentreringssystem: visuelt system og mekanisk sentreringsklo for komponentsentrering
Z-aksedrift: servo- eller pneumatisk system for å kontrollere plasseringshøyden
θ-akse rotasjon: stepper- eller servomotor for komponentvinkelrotasjon
2. Elektronisk system
Giversystem: høyoppløselig giver for presis posisjonering
Sensorsystem:
Vakuumsensor
Høydesensor
Posisjonssensor
Temperatursensor
Kontrollkort: dedikert kontrollkretskort
3. Hjelpesystem
Dyseutskiftningsenhet: automatisk eller halvautomatisk dyseutskiftningsmekanisme
Rengjøringssystem: automatisk dyserengjøringsenhet
Smøresystem: automatisk smøreanordning
III. Funksjoner og effekter
Komponentplukking: Plukk nøyaktig opp SMD-komponenter med forskjellige spesifikasjoner fra materen
Komponentdeteksjon: Sjekk om komponenten plukkes opp normalt gjennom vakuum
Komponentsentrering: Korriger komponentens posisjon og vinkel med visuelle eller mekaniske midler
Presis plassering: Plasser komponenten nøyaktig på den angitte posisjonen på kretskortet med innstilt trykk og vinkel
Dysehåndtering: Identifiser og bytt ut dyser med forskjellige spesifikasjoner automatisk
Prosessovervåking: Sanntidsovervåking av ulike parametere under plasseringsprosessen
IV. Vanlige feil og feilinformasjon
1. Mekaniske feil
E101: Feil ved overskridelse av Z-aksens grense – Z-aksens bevegelse overskrider det angitte området
E205: Dysestang sitter fast - Dysestangen kan ikke bevege seg normalt opp og ned
E307: θ-akseposisjoneringsfeil - Rotasjonsaksen kan ikke nå den angitte vinkelen
2. Feil i vakuumsystemet
E401: Feil med vakuumetablering - Klarer ikke å etablere tilstrekkelig vakuum for plukking
E402: Vakuumlekkasje - vakuumet faller for raskt etter plukking
E403: Feil på vakuumutløser – kan ikke løsne komponent etter montering
3. Sensorfeil
E501: Feil med høydesensor
E502: Tap av encodersignal
E503: Temperatursensor utenfor grensen
4. Feil i elektronisk system
E601: Feil på servodrift
E602: Kommunikasjonsavbrudd på kontrollkortet
E603: Unormal strømforsyningsspenning
V. Vedlikeholdsmetoder
1. Daglig vedlikehold
Rengjøringsarbeid:
Rengjør dysen og dysestangen daglig
Rengjør støvsugerfilteret
Fjern støv og rester rundt arbeidshodet
Smørearbeid:
Smør føringsskinnene og ledeskruene regelmessig i henhold til anvisningene i håndboken.
Bruk den angitte typen fett
Inspeksjonsarbeid:
Sjekk om hver sensor fungerer som den skal
Sjekk om trykket i vakuumsystemet er normalt
Sjekk om det er unormale lyder i hver bevegelige del
2. Regelmessig vedlikehold
Månelig vedlikehold:
Rengjør hele arbeidshodet grundig
Kontroller og skift ut slitte O-ringer
Kalibrer posisjonsnøyaktigheten til hver akse
Quarter vedlikehold:
Bytt ut vakuumfilteret
Kontroller og juster beltestrammingen
Kalibrer det visuelle systemet fullstendig
Årlig vedlikehold:
Skift ut slitte mekaniske deler
Sjekk det elektriske systemet grundig
Utfør en omfattende ytelsestest
VI. Vedlikeholdsideer
1. Feildiagnoseprosess
Observer fenomenet: registrer feilkoden og maskinstatusen
Analyser mulige årsaker: List opp mulige årsaker i henhold til manualen og erfaringen
Trinnvis feilsøking: Sjekk én etter én fra enkel til kompleks
Verifisering og reparasjon: Testing og verifisering etter reparasjon
2. Håndtering av vanlige feil
Plasseringsforskyvning:
Sjekk kalibreringen av det visuelle systemet
Sjekk den mekaniske sentreringsmekanismen
Sjekk kodersignalet
Feil med komponentopptak:
Sjekk vakuumsystemet
Kontroller dysevalg og slitasje
Sjekk materposisjonen
Unormal bevegelse:
Sjekk servodrift og motor
Sjekk mekaniske transmisjonskomponenter
Sjekk posisjonssensoren
3. Forholdsregler for vedlikehold
Sikkerhet først: Utfør mekanisk vedlikehold etter at strømmen er slått av
Antistatiske tiltak: Ta antistatisk beskyttelse når du håndterer elektroniske komponenter
Bruk originale reservedeler: Prøv å bruke originale reservedeler
Registrer vedlikeholdsprosessen: Registrer vedlikeholdstrinnene og reservedelene i detalj
VII. Trender innen teknologiutvikling
Høyere hastighet: ta i bruk lettere design og raskere drivsystem
Høyere presisjon: anvendelse av nanoposisjoneringsteknologi
Intelligens: integrer flere sensorer for å oppnå prediktivt vedlikehold
Modulær design: praktisk for rask utskifting og reparasjon
Multifunksjonsintegrasjon: integrer flere deteksjonsfunksjoner i arbeidshodet
Gjennom den ovennevnte omfattende forståelsen av strukturen, funksjonen, vedlikeholds- og reparasjonsmetodene til CPP-arbeidshodet, kan du bedre bruke og vedlikeholde ASM-plasseringsmaskinen for å sikre stabil og effektiv drift av produksjonslinjen.







